
Jsme tým, který bere CanSat jako skutečnou kosmickou misi, jen v menším měřítku. Navrhujeme, stavíme a testujeme vlastní satelit o velikosti plechovky, který musí fungovat v reálných podmínkách, ne jen na papíře. Projekt propojuje elektroniku, software, mechaniku a systémové myšlení do jednoho funkčního celku.
Nejde nám jen o splnění zadání. Jdeme cestou experimentu, analýzy a neustálého zlepšování, agilně. Každé rozhodnutí se snažíme opřít o data, každé řešení porovnáváme s alternativami. CanSat je pro nás platforma, kde se učíme dělat skutečné inženýrství, od nápadu až po vyhodnocení výsledků a zpětnou vazbu.
Náš tým

Eduard
David
Koudy
Tomáš
Matyáš

Oliver
Vize a přesah projektu
Suborbitum-3 chce být víc než jen soutěžní tým. Naším cílem je inspirovat další děti a studenty k technickému vzdělávání a ukázat, že technologie jsou dobrodružství, ne strašák. Projekt má zároveň silnou výzkumně-vývojovou (R&D) rovinu. Systematicky porovnáváme různá řešení, analyzujeme výsledky a sdílíme zkušenosti, které mohou pomoct dalším týmům i budoucím projektům.

Primární mise
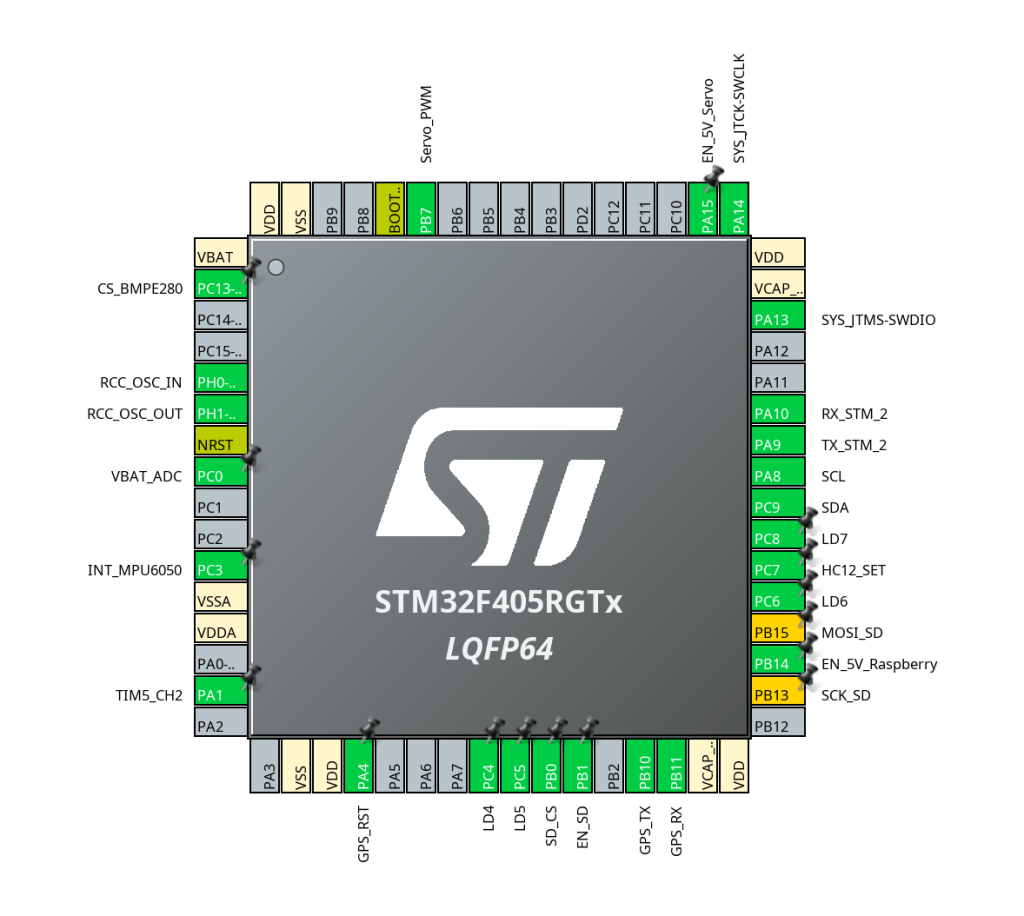
Primární mise běží na mikroprocesoru STM32F407RB, který je osazen na PCB vlastního návrhu a výroby. K mikrprocesoru jsou po I2C sběrnici připojeny senzory fyzikálních veličin – teploty, atmosférického tlaku, akcelerometr, gyroskop a magnetometr. Měření teploty zajišťuje senzor SHT40, atm. tlaku senzor BMP 280, jako akcelerometr a gyroskop se používá MPU6050 a osazen je magnetometr IIS2MDC. Dále je k mikroprocesoru připojen GNSS modul, který komunikuje po sériové lince. S pozemní stanicí modul primární mise komunikuje v pásmu 433 MHz a využívá k tomu moduly HC-12, se kterými máme z minulých let dobré zkušenosti a navíc jsou extrémně jednoduché na použití. Data jsou během letu zálohována na microSD kartu, která je připojena přes rozhraní SDIO. Pro vývoj firmware jsme využili sadu STM32Cube a knihovny HAL. Program je napsán neblokujícím způsobem a díky využití DMA efektivně využívá čas procesoru. V programu se nenachází žádné zpoždění. Firmware také obstarává komunikaci naměřených fyzikálních veličin Raspberry Pi Zero 2W, které obstarává sekundární misi.
Sekundární mise
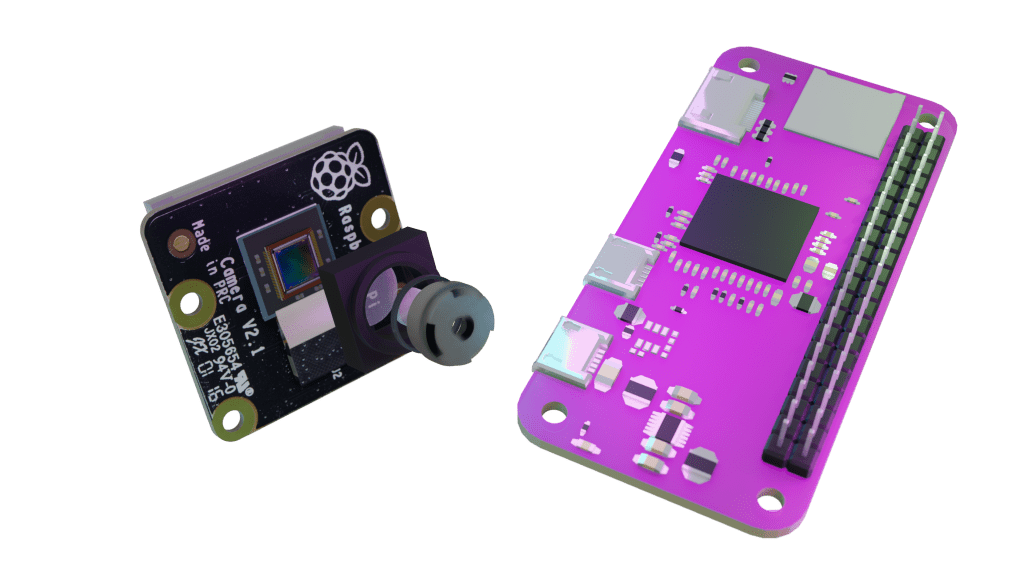
Sekundární mise je realizována na mikropočítači Raspberry Pi Zero 2W, který ovládá palubní kameru. Jeho hlavním úkolem je zaznamenávat průběh letu, kamera pořizuje krátká videa v pětisekundových úsecích, která jsou následně spojena do jednoho souvislého záznamu. Souběžně Pi pořizuje jednotlivé fotografie, jež lze využít pro analýzu rychlosti nebo další podrobné zkoumání letu.
Veškerá data jsou průběžně ukládána na microSD kartu, což zajišťuje jejich bezpečné uchování. Firmware je navržen tak, aby natáčení videí a pořizování snímků probíhalo souběžně a efektivně, bez zbytečných prodlev či ztrát dat.